Intelligenta kartor hjälper robotar att hitta i ditt hem
Automatiska robotar kan hjälpa oss med många serviceuppgifter, exempelvis i hemmet eller för att flytta gods i ett lager. Eftersom robotar saknar mänskliga sinnen är de beroende av information från bland annat sensorer för att kunna navigera. Ny forskning från Högskolan i Halmstad visar hur robotar ska kunna förstå och bli mer medvetna om sin omgivning så att de effektivt kan anpassa sina rörelser i utmanande arbetsutrymmen.
På en yta där robotar och människor arbetar sida vid sida är det viktigt att robotarna är "lydiga" och medvetna om sin omgivning. Semantiska kartor är ett sätt att ge roboten denna utökade förståelse.
– Saeed Gholami Shahbandi
När en mobil robot ges möjlighet att upptäcka sin omgivning – allt i från väggarna i rummet, till hinder som till exempel människor och stolar – kan den skapa sin egen karta. Robotkartan kan utvecklas genom att lägga till lager av information från en mängd olika källor, så som kameror och laserskannrar. På så vis integreras ytterligare kunskaper i robotarnas interna representation av omgivningen. Denna typ av berikade kartor kallas för semantiska kartor. De är en viktig pusselbit för att kunna skapa effektiva och pålitliga automatiska mobila robotar.
– På en yta där robotar och människor arbetar sida vid sida är det viktigt att robotarna är "lydiga" och medvetna om sin omgivning. Semantiska kartor är ett sätt att ge roboten denna utökade förståelse, säger doktoranden Saeed Gholami Shahbandi vid Akademin för informationsteknologi vid Högskolan i Halmstad.

Saeed Gholami Shahbandi är doktorand vid Akademin för informationsteknologi och disputerar den 14 juni med sin doktorsavhandling "Interpretation and Alignment of 2D Indoor Maps: Towards a Heterogeneous Map Representation". Bild: IDA FRIDVALL
"Robotikforskning förbättrar människans livskvalitet ytterligare"
Saeed Gholami Shahbandi försvarar sin avhandling i ämnet den 14 juni. I sin forskning föreslår han tekniker som ger mer information till kartor genom modellering och semantisk notering, med syfte att berika den slutliga robotkartan.
– Robotisk kartläggning är ett avancerat forskningsområde som bygger på stora förbättringar inom robotik, maskininlärning och datorseende. En sådan omfattande forskningsdisciplin har gjort det möjligt att utveckla metoder som kan hantera utmanande miljöer som lager- och kontorsbyggnader eller bostäder, säger Saeed Gholami Shahbandi och fortsätter:
– Jag ser fram emot att robotikforskning förbättrar människans livskvalitet ytterligare och att robotar blir tillgängliga i allas vardag. Jag hoppas att även jag får privilegiet att fortsätta bidra inom området.
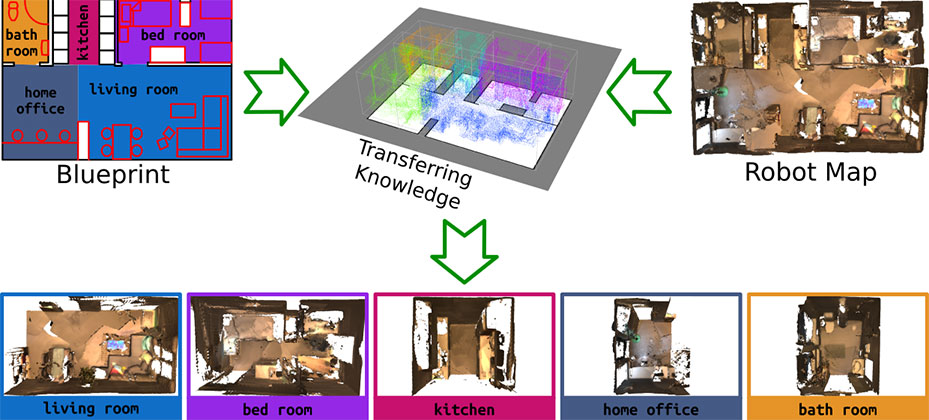
Semantiska kartor skapas genom att lägga på lager av information från omgivningen. Bilden är ett exempel på en sådan karta över Halmstad Intelligent Home (HINT) – en realistisk och smart hemmiljö för forskning vid Högskolan i Halmstad – där Saeed Gholami Shahbandi använt information från bland annat sensorer och kameror för att ta fram en berikad karta för robotar. Bild: SAEED GHOLAMI SHAHBANDI
Text: LOUISE WANDEL
Toppillustration: JOACHIM BRINK och IDA FRIDVALL