Lagertruckar blir intelligenta med hjälp av semantiska kartor
Smarta truckar är säkra truckar, och de kan arbeta sida vid sida med människor i exempelvis ett lager. För att vara smarta behöver truckarna kartor fyllda med information. Saeed Gholami Shahbandi presenterade nyligen sin licentiatavhandling om hur dessa så kallade semantiska, eller rika, kartor skapas.
"Självgående lagertruckar som uppför sig väl är avgörande verktyg för automatiserade lager."
Saeed Gholami Shahbandi
Det övergripande målet med AIMS-projektet, vilket Saeed Gholami Shahbandis licentiatuppsats är del av, är att bygga en semantisk karta. Med mängder av information om miljön vet trucken mer om hur den ska röra sig säkert och mer effektivt. Det är ett viktigt steg mot självgående truckar eller robotar.
– I ett arbetsutrymme där truckar och människor verkar sida vid sida är det viktigt att automationen är tillförlitlig, och därför behöver de vara medvetna om sin omgivning. Rika kartor är ett sätt att förse truckarna med medvetenhet. Och självgående lagertruckar som uppför sig väl är avgörande verktyg för automatiserade lager, säger Saeed Gholami Shahbandi.
Automatisera kartläggningen
I dag tillåter tekniken att truckar rör sig utmed gångar med förinstallerade markörer eller sensorer.
– Det jag försöker göra är att automatisera själva kartläggningen av miljön, säger Saeed Gholami Shahbandi, som ser ett scenario där en truck kan skickas in i ett lager och på egen hand skapa kartan den behöver för att ta sig runt och arbeta.
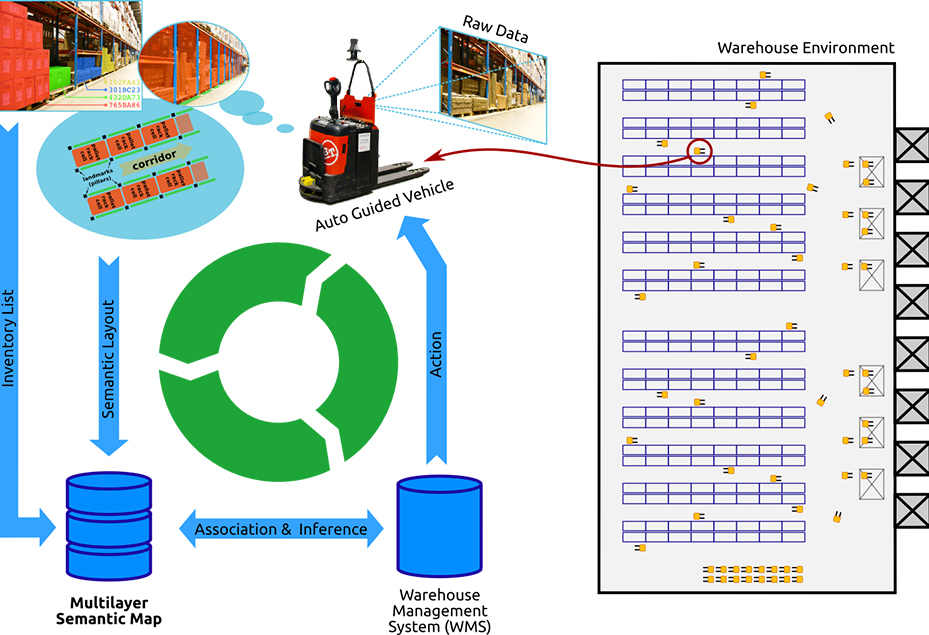
För att göra den självgående trucken smartare, och för att kunna be den gå in i ett utrymme och skapa sin egen karta, behövs sätt att utveckla dessa kartor. Saeed Gholami Shahbandis forskning tacklar problemet med att göra modeller av miljön för truckarna. Det gör han med hjälp av olika sensorer, som laserscannrar och kameror.
– Vi vill bygga den semantiska kartan genom att sammanfoga kartor från olika sensorer. I min licentiatuppsats visar jag hur man har en abstrakt version av varje karta oberoende av sensortyp. Det gör det möjligt för oss att sedan sammanfoga kartor från olika sensorer.
Test i lagermiljö
Saeed Gholami Shahabandi och hans forskarkollegor har varit i lagerbyggnader och samlat information för att testa metoderna i verkliga situationer.
– Vi installerade sensorer på självgående truckar som körde runt, samlade in data och skapade kartor med hjälp av dem, säger han.
Robotarna behöver också kunna upptäcka om något i miljön ändras, så att även kartan kan justeras. Det är också en fråga om säkerhet:
– Ju bättre kartan är, desto mer medveten blir trucken om sin omgivning och desto säkrare blir truckens beslut.

Ur filmen om AIMS-projektet, del som är filmad med tillstånd av Kollmogen.
Saeed Gholami Shahabandi arbetar nu på sin doktorsavhandling, i vilken han utvecklar sitt arbete och lägger samman olika typer av kartor för att skapa ännu bättre semantiska kartor.
– Detta är ett väldigt avancerat område, som lutar sig mot och drar nytta av mängder av olika framsteg inom robotik. Forskningen förbättrar också robotik i sig och utvecklar specifika metoder som kan hantera väldigt utmanande miljöer, exempelvis lagerbyggnader.
Ju bättre kartan är, desto mer medveten blir trucken om sin omgivning och desto säkrare blir truckens beslut.
Saeed Gholami Shahbandi påpekar att hans forskning, och projektet AIMS endast använder lagermiljön som ett exempel.
– Men grundtekniken gäller inte specifikt för lager. Den kan användas för rörliga robotar exempelvis i hemmet eller på sjukhus. Ett annat forskningsprojekt på Högskolan handlar om hantering och styrning av stora självgående truckar i hamnar där många containrar behöver sorteras.
Text: KRISTINA RÖRSTRÖM
Saeed Gholami Shahbandi försvarade sin licentiatuppsats Semantic Mapping in Warehouses den 23 september. Läs den i DiVA Länk till annan webbplats, öppnas i nytt fönster.